
Das vom Bundesministerium für Bildung und Forschung (BMBF) geförderte Projekt ROBDEKON startete im Jahr 2018. Was können sich unsere Leserinnen und Leser darunter vorstellen?
ROBDEKON ist ein Kompetenzzentrum, in dem sich führende Forschungseinrichtungen mit der Industrie zusammengeschlossen haben, um eine zentrale Anlaufstelle für Fragestellungen zur roboterbasierten Dekontamination in menschenfeindlichen Umgebungen zu bilden. Exemplarisch werden die Themenfelder Sanierung von Deponien und Altlasten sowie Rückbau eines Kernkraftwerks beleuchtet, wobei die entwickelten Technologien auch in anderen menschenfeindlichen Anwendungsfeldern zum Einsatz kommen können und sollen. Das Kompetenzzentrum läuft zunächst über 4 Jahre. Wird die Arbeit des Kompetenzzentrums positiv bewertet, gibt es die Option, weitere 4 Jahre gefördert zu werden. Danach soll sich das Kompetenzzentrum selbst tragen, indem es beispielsweise Dienstleistungen für die Wirtschaft anbietet.
Das Forschungsprojekt wartet mit namhaften Partnern wie dem Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB oder dem Deutschen Forschungszentrum für Künstliche Intelligenz auf. Worin liegt der Kern der Forschungsarbeit?
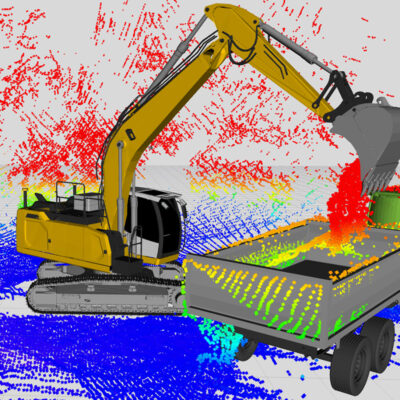
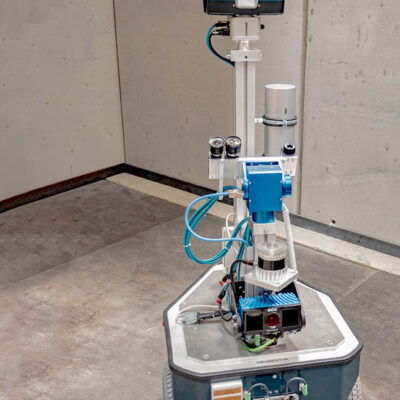
Die Arbeiten konzentrieren sich stark darauf, die Algorithmen und Methoden so weit zu entwickeln, dass sie in einem der vier ROBDEKON-Demonstratoren auch praktisch vorgeführt werden können. Die vier Demonstrationsszenarien sind das Abfräsen einer Wand im Kernkraftwerk mit anschließendem Abtransport des Staubfasses, das Rückholen von Gefahrenstoffen mit einer mobilen Roboterplattform, das autonome Ausheben von Bodenmaterial einer Altlast mit einem Kettenbagger und die Fassbergung auf einer Deponie mit einem autonomen Schreitbagger.
Um den Menschen durch den Einsatz autonomer Systeme aus einer menschenfeindlichen Umgebung heraushalten zu können, müssen viele Dinge, die ein Mensch ohne Nachzudenken „mit links“ macht, erst mühsam erarbeitet werden. Menschen sind nämlich sehr gut darin, schnell ein Umgebungsverständnis aufzubauen, und können gut filigrane mechanische Arbeiten ausführen (z. B. auch mit Schutzhandschuhen komplexe Greifaufgaben erledigen). Diese Aufgaben sind für Robotersysteme eine große Herausforderung. Allerdings sind die Arbeiten für die Menschen teils gesundheitsschädlich, ausgesprochen kräftezehrend (wenn man beispielsweise an das Tragen eines Vollschutzes denkt) oder es existiert schlicht ein großer zusätzlicher Zeitaufwand die Schutzmaßnahmen umzusetzen, so dass wenig Nettoarbeitszeit zur Lösung der Aufgabe übrigbleibt. Hier können robotische Systeme ermüdungsfrei unterstützen und den Menschen aus der Gefahrenzone heraushalten, bzw. den menschlichen Einsatz in der Gefahrenzone effizienter gestalten.
Welche Ziele verfolgt ROBDEKON in erster Linie?
In der ersten Stufe des Kompetenzzentrums geht es vor allem darum, den Anwendern deutlich zu machen, welche Potenziale die Unterstützung durch Robotik bietet. Oftmals sind aktuelle Technologien nicht ausreichend bekannt, oder die Möglichkeiten und Grenzen der Systeme werden unter- oder überschätzt. Hier soll ROBDEKON als Ansprechpartner fungieren und eine Verknüpfung der Anwender mit der Forschung ermöglichen. Dazu werden in ROBDEKON aktuelle Technologien weiter erforscht und in praxisrelevante Demonstratoren verpackt. So können Anwender in Kontakt mit der Technik kommen und ein Gefühl für die Möglichkeiten der Systeme erhalten, ohne aufs Geratewohl in eigene Systeme investieren zu müssen.
Dr.-Ing. Philipp Woock
- 2009: Abschluss des Studiums der Informatik an der Universität Karlsruhe
- 2015: Promotion zum Dr.-Ing. an der Fakultät für Informatik am KIT Karlsruhe über die Umgebungskartenschätzung aus Sidescan-Sonardaten für ein autonomes Unterwasserfahrzeug
- seit 2019: Wissenschaftlicher Mitarbeiter am Fraunhofer IOSB Karlsruhe
Wie sehen mögliche Anwendungsfälle oder Einsatzgebiete für diese Technologien aus? Welche Branchen können von ihren Forschungsergebnissen profitieren?
Das Spektrum menschenfeindlicher Umgebungen ist sehr breit. Es reicht von Arbeiten im Vollschutz in der Dekontaminationszelle im Kernkraftwerk über Bagger mit Frischluftversorgung bis hin zu Sortierung gefährlicher Abfälle. Die Fragestellungen aus Forschungssicht überschneiden sich aber dennoch. In all diesen Situationen muss die Umgebung erfasst werden und eine virtuelle Repräsentation („Karte“) der Umgebung aufgebaut werden. In dieser sollen die Systeme dann Aktionen (teil-)autonom ausführen. Diese Aktionen müssen sinnvoll geplant werden und die korrekte Durchführung der Aktionen muss überwacht werden. Diese technischen Einzelschritte stellen eine Grundlage sehr vieler Problemstellungen dar.
An dieser Stelle möchte ich betonen, dass die vollständige Autonomie der Robotersysteme zwar ein Fernziel darstellt, aber ähnlich zum selbstfahrenden Auto zunächst nur Teilaspekte automatisiert werden, um den Menschen zu unterstützen. Das Antiblockiersystem (ABS) beim Auto war früher ein zusätzliches Assistenzsystem, das sich bewährt hat, und deshalb inzwischen in allen Autos zu finden ist. Die Liste bei der Automobilentwicklung ließe sich leicht fortsetzen, z. B. mit dem elektronischen Stabilitätsprogramm (ESP). Um den Bogen zurück zu schlagen: Wir glauben, dass es sehr viele Branchen gibt, in denen robotische Assistenzfunktionen die Sicherheit von Menschen steigern können ohne notwendigerweise die Wirtschaftlichkeit dabei zu verringern.
Im Rahmen von ROBDEKON finden jährlich sog. Partizipationsveranstaltungen statt (aufgrund der Pandemiesituation leider 2020 nicht), in denen Anwender sich mit den Forschern austauschen und einen tieferen Einblick in die Robotersysteme bekommen können. Dort soll auch diskutiert werden, wie eine sinnvolle Unterstützung in der Praxis aussehen kann und wo bei den Anwendern „der Schuh drückt“.





ROBDEKON kann beim Rückbau von Kernkraftwerken unterstützen. Welche Herausforderungen treten hierbei aktuell in der Praxis auf?
Kernkraftwerke sind ein hoch regulierter Bereich und die Prozeduren, bis ein Gegenstand von allen Kontaminationen befreit wurde und anschließend als unbelastet gilt (das sog. Freimessen), sind sehr aufwändig. Hier können robotische Systeme unterstützen, indem Gegenstände mit einem Greifarm aufgenommen und durch das Robotersystem zu einem anderen Ort gebracht werden. Auch beim Freimessen einer Wand im Kraftwerk kann robotisch unterstützt werden. Hier muss von einer kontaminierten Wand die Kontamination abgefräst und danach mit einem Messgerät die verbliebene Belastung gemessen werden. Solche monotonen Arbeiten mit hohem Schutzaufwand für den Menschen können mit Robotik unterstützt werden, so dass der Arbeiter sich auf die schwierigen Stellen konzentrieren kann und die Arbeitszeit möglichst effizient eingesetzt wird.
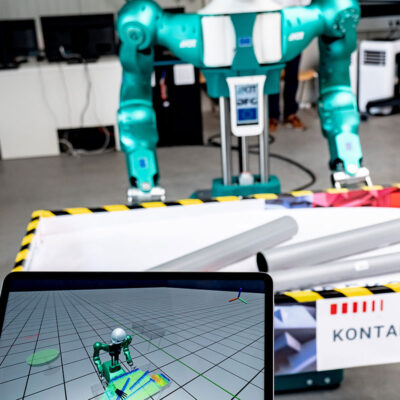
Ein Teilaspekt in ROBDEKON ist auch die Teleoperation von Robotersystemen. Hierbei handelt es sich um eine Erweiterung der klassischen Fernsteuerung, welche dem Nutzer erlauben soll, die Systeme mit neuartigen Bedienkonzepten der virtuellen Realität und der augmentierten Realität intuitiv bedienen zu können. Der Nutzer könnte außerhalb der menschenfeindlichen Umgebung in einem Leitstand sitzend nicht nur wie bisher über Kamerabilder die Umgebung betrachten, sondern könnte sich virtuell umherbewegen und einen Arbeitsbereich beispielsweise aus einer anderen Perspektive betrachten. Dabei könnte zuerst in der Simulation ausprobiert werden, ob etwas funktioniert, bevor man tatsächlich Zeit investiert und evtl. nicht zum Erfolg kommt.
Besonders bei der Sortierung und Entsorgung gefährlicher Abfälle können assistierende Robotertechnologien ein hilfreiches Mittel darstellen. Welche Potenziale birgt ROBDEKON für die Abfallwirtschaft?
In der Abfallwirtschaft hat man es oft mit Sortier-Fragestellungen zu tun. Hier könnten Roboterarme an einem Förderband eine Vorsortierung vornehmen und sich mit den Objekten befassen, die für Menschen eine Gefahr darstellen können. So kommt es durchaus vor, dass sich alte Lithiumionen-Akkus entzünden und giftige Gase entstehen. Werden diese Fälle durch Robotersysteme behandelt, müssen keine Menschen dieser Gefährdung ausgesetzt werden.
Die technischen Lösungen, die in ROBDEKON entwickelt werden, sind flexibel einsetzbar und – soweit technisch möglich – nicht von vorneherein auf ein einzelnes Szenario begrenzt. Es wird in praktischen Anwendungen oft der Fall sein, dass ein mobiles System in einer zunächst unbekannten Umgebung eine Route finden muss, um zu einem Zielort zu gelangen. Auch das Greifen von unbekannten Objekten ist eine Fähigkeit, die bei vielen Fragestellungen in der Abfallwirtschaft eingesetzt werden kann. Auch wenn die Systeme zu Beginn noch nicht die Ausführungsgeschwindigkeit eines Menschen besitzen, darf man nicht außer Acht lassen, dass die Systeme im Dauerbetrieb arbeiten können und diesen Nachteil damit teilweise wettmachen.
Forschung bedarf meist ausführlicher Erklärung in der Öffentlichkeit und die Fähigkeit zur Abstraktion. Vor allem der Einsatz künstlicher Intelligenz steht dabei nicht selten in der Kritik. Mit welchen Fragen – und möglicherweise auch Vorurteilen – sieht sich ROBDEKON diesbezüglich konfrontiert?
ROBDEKON selbst wurde bisher noch nicht mit skeptischen Fragen konfrontiert. Methoden der künstlichen Intelligenz sind allerdings äußerst vielfältig und der Begriff wird aktuell geradezu inflationär für alle Methoden des maschinellen Lernens angewendet. In den letzten zehn Jahren haben tatsächlich die Methoden der tiefen neuronalen Faltungsnetze („Deep Learning“, DL) durch die inzwischen verfügbare Rechenleistung erhebliche Fortschritte gemacht und erzielen teilweise wirklich beeindruckende Ergebnisse.
Als datengetriebener Ansatz ist es allerdings so, dass die Methoden zur Erklärbarkeit der DL-Systeme noch nicht so weit gediehen sind, wie die Systeme selbst. Soll heißen: Man sieht, dass die DL-Systeme insgesamt tolle Ergebnisse bringen, die im Mittel erheblich besser funktionieren als frühere Methoden, aber teilweise ab und zu doch noch haarsträubende Fehler machen und nicht unmittelbar klar wird, warum dieses Verhalten in einer bestimmten Situation auftritt. Deshalb wird diesen DL-Methoden oft noch mit einer großen Skepsis begegnet, nicht zuletzt, weil es Haftungsfragen nach sich zieht. Allerdings arbeitet so ein DL-System nicht isoliert, sondern behandelt meist nur einen Teilaspekt der gesamten robotischen Fragestellung und ist eng mit dem Rest des Systems verwoben. Das bedeutet, dass ein DL-System nicht einfach machen kann, was es will, sondern dass viele Sicherungsschichten im Gesamtsystem unerwünschtes Verhalten unterbinden. Dafür wird jeder ernsthafte Systemdesigner Sorge tragen.
Ein weiterer Aspekt ist die hin und wieder geäußerte Befürchtung, dass Menschen durch Roboter „Arbeitsplätze weggenommen“ werden. Hier muss man sich fragen, ob ein Arbeitsplatz mit hoher Gesundheitsgefährdung wirklich erstrebenswert ist, oder ob er mithilfe von assistierender Robotertechnik nicht durch einen menschenfreundlichen Arbeitsplatz ersetzt werden könnte. Die Expertise der Menschen wird ja weiterhin gebraucht. Als alternde Gesellschaft muss man zudem bedenken, dass körperlich anstrengende Tätigkeiten ab einem gewissen Alter nicht mehr durchgeführt werden können. Hier könnte sich für ältere Arbeitnehmer durch die Robotertechnik die Möglichkeit bieten, das Fachwissen weiter einzubringen während das Robotersystem den mechanischen Part übernimmt. Dies gilt ganz allgemein und nicht nur in der Dekontaminationsrobotik.
Was wünschen Sie sich in Hinblick auf das Zusammenwirken von Forschung und Wirtschaft in Deutschland?
Wir glauben, dass die Wirtschaft Potenziale ungenutzt lässt, weil es entweder an Wissen über die modernen Technologien mangelt oder aber wenig Experimentierfreude vorhanden ist, auch neuartigen Konzepten eine Chance zu geben. Die Forschung ist jedoch auch nicht unschuldig, da die erarbeiteten Lösungen oftmals zu Beginn nicht wirtschaftlich genug sind, um für die Anwender von Interesse zu sein. Diesem Henne-Ei-Konflikt versuchen wir in ROBDEKON durch enge Anbindung an die Praxis von Beginn an zu vermeiden. Wir haben im ROBDEKON-Konsortium Anwendungspartner, die darüber wachen, dass die erarbeiteten Lösungen nicht im akademischen Elfenbeinturm bleiben, sondern praktisch relevante Fragestellungen adressieren.
Vielen Dank für das Gespräch!

